![Thợ Sửa Máy Giặt [ Tìm Thợ Sửa Máy Giặt Ở Đây ]](https://thomaygiat.com/wp-content/uploads/sua-may-giat-lg-tai-nha-1.jpg)
Bộ mã hóa quay tuyệt đối
Có hai loại bộ mã hóa quay: bộ mã hóa quay tăng dần và bộ mã hóa quay tuyệt đối. Trong bài viết này, chúng ta sẽ xem xét bộ mã hóa quay tuyệt đối, nguyên lý làm việc và ứng dụng của chúng.
Mục Chính
- Bộ mã hóa quay tuyệt đối là gì ?
- Nguyên tắc thao tác của bộ mã hóa quay tuyệt đối
- Ưu điểm của bộ mã hóa tuyệt đối
- Bộ mã hóa tăng dần so với tuyệt đối
- Ứng dụng mã hóa tuyệt đối
- Đầu ra bộ mã hóa tuyệt đối
- Các loại mã hóa tuyệt đối
- Bộ mã hóa tuyệt đối một lượt so với nhiều lượt
- Bộ mã hóa tuyệt đối từ tính là gì ?
- Giao diện một bộ mã hóa tuyệt so với Raspberry Pi
- Giá bộ mã hóa tuyệt đối
- Kết luận
Bộ mã hóa quay tuyệt đối là gì ?
Bộ mã hóa quay tuyệt đối thuộc họ bộ mã hóa quay. Chúng được sử dụng để đo các thông số sau của các vật thể quay như trục hoặc trục:
Vận tốc góc
Bạn đang đọc: Bộ mã hóa quay tuyệt đối
- tin tức vị trí
- Khoảng cách
Bộ mã hóa quay tuyệt đối được tìm thấy trong những ứng dụng nhu yếu phép đo đúng chuẩn vị trí và độ di dời góc. Các cảm ứng này cũng tìm thấy những ứng dụng của chúng trong những mạng lưới hệ thống cần đo vận tốc quay .
Các cảm biến này tạo ra một từ duy nhất (một từ là tập hợp các bit) theo vị trí hiện tại của cảm biến.
Điều này khác với các bộ mã hóa quay tăng dần vì các bộ mã hóa tăng dần được thiết kế để xuất ra một dòng xung liên tục ở khắp mọi nơi trong khi bộ mã hóa tuyệt đối xuất ra một tập hợp các bit duy nhất cho mỗi vị trí của cảm biến.
Điều này cho phép chúng tôi đo lường vị trí chính xác (tuyệt đối) của trục thay vì tính toán thay đổi vị trí.
Hãy cùng khám phá sâu về cách hoạt động giải trí của bộ mã hóa quay tuyệt đối .
Nguyên tắc thao tác của bộ mã hóa quay tuyệt đối
Các bộ mã hóa quay tuyệt đối, khi được so sánh với những bộ mã hóa quay tăng dần, hoạt động giải trí hơi phức tạp, nhưng đơn thuần để sử dụng trong một ứng dụng .
Tương tự như những bộ mã hóa quay tăng dần, những bộ mã hóa tuyệt đối cũng có một trục quay gắn với cảm ứng. Trục được liên kết với một đĩa bằng một bộ rãnh được đặt cẩn trọng. Bánh xe này còn được gọi là ‘ bánh xe mã ‘ .
Bánh mã có một mẫu bit độc lạ. Không giống như những bộ mã hóa ngày càng tăng trong đó toàn bộ những vị trí được đặt trong một quy mô tái diễn, những vị trí của bộ mã hóa tuyệt đối của bộ mã hóa tuyệt đối khác với nhau .
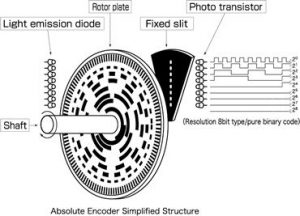
Khi trục quay, bánh mã cũng quay cùng với nó. Có một bộ đèn LED phát ra chùm ánh sáng vào bánh mã. Khi chùm ánh sáng thẳng hàng với những khe, những chùm sáng đi qua bánh mã, khe cố định và thắt chặt và chiếu sáng những quang trở .
Có những bộ mã hóa tuyệt đối từ tính sửa chữa thay thế mảng LED bằng mảng cảm ứng từ tính và một bộ cực từ sửa chữa thay thế những điểm lưu lại quang học .
Mỗi phototransistor hoạt động giải trí độc lập và khi được chiếu sáng, chúng xuất ra tín hiệu logic CAO. Khi không có chùm tia nào hiện hữu tại một phototransistor đơn cử, nó sẽ xuất ra mức logic LOW .
Số lượng phototransistor và mức độ của những khe được khắc trong bánh mã xác lập độ đúng mực và độ phân giải của bộ mã hóa quay tuyệt đối .Điều này thường được nêu trong bit. Ví dụ, một bộ mã hóa tuyệt đối có độ phân giải 8 bit có thể cung cấp thông tin 256 vị trí và có thể đo các dịch chuyển góc của gia số 1.41 độ.
Tùy thuộc vào loại bộ mã hóa tuyệt đối và cấu trúc của nó, có nhiều thông số kỹ thuật đầu ra có sẵn :
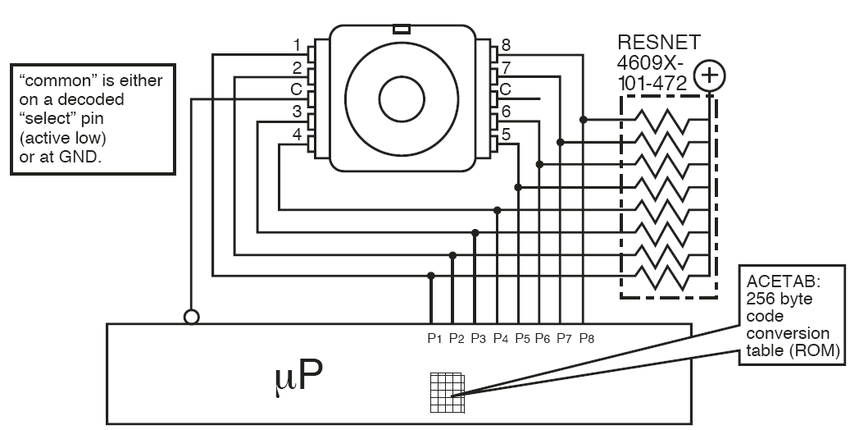
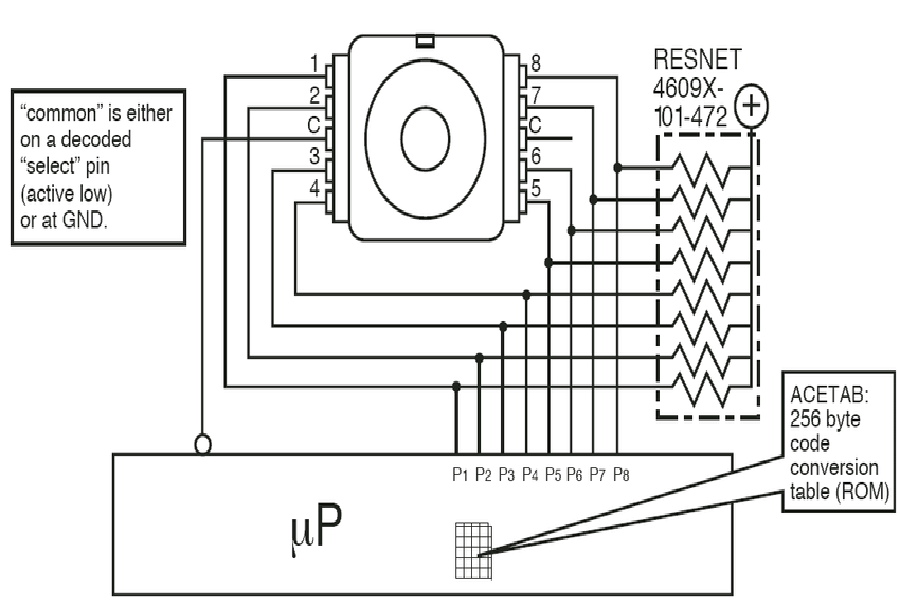
- Đầu ra song song
- Loại cảm ứng này có nhiều đường ra cung ứng thông tin vị trí. Ví dụ, một cảm ứng đầu ra song song 8 bit có 8 đường tín hiệu và hai dây cấp nguồn. Đầu ra hoàn toàn có thể được mã hóa trongnhị phân ormã màu xám định dạng .
- Cảm biến đầu ra song song có số lượng mạch tích hợp rất tối thiểu vì nó không tương quan đến nhiều quy trình giải quyết và xử lý .
- Đầu ra tiếp nối đuôi nhau
- Bộ mã hóa tuyệt đối đầu ra tiếp nối đuôi nhau xuất ra thông tin vị trí và vận tốc trải qua một giao thức truyền dữ liệu đồng nhất .
- Các cảm ứng đầu ra tiếp nối đuôi nhau có tài liệu và đường xung nhịp, và xuất ra một bit cho mỗi xung đồng hồ đeo tay. Các cảm ứng này cũng có định dạng đầu ra được mã hóa nhị phân hoặc màu xám .
- Để tăng năng lực chống nhiễu, cảm ứng loại đầu ra tiếp nối đuôi nhau sử dụng tiếp xúc cặp vi sai theoTiêu chuẩn RS-422. Một cặp cho mỗi đồng hồ đeo tay và một cặp cho những dòng tài liệu .
- Hầu hết những giải pháp tiếp xúc đồng điệu thông dụng cho bộ mã hóa tuyệt đối làSSI: Giao diện nối tiếp đồng bộ, BiSS: Giao diện nối tiếp đồng bộ hai chiều và DSL Hiperface. Ngoài ra còn có những giao diện độc quyền nhưEnDat2.2.
- Đầu ra analog
- Cảm biến đầu ra tương tự như xuất ra một giá trị điện áp hoặc dòng điện tùy thuộc vào vị trí của cảm ứng .
Ưu điểm của bộ mã hóa tuyệt đối
Các bộ mã hóa tuyệt đối, mặc dầu ngân sách cao hơn một chút ít nhưng có nhiều lợi thế về cảm ứng vị trí :
- Đưa ra vị trí tuyệt đối của trục
- Khi được ‘ thăm dò ‘, bộ mã hóa tuyệt đối xuất ra thông tin vị trí duy nhất tương quan đến vị trí hiện tại của nó. Điều này có nghĩa là không có hai vị trí của trục trong một hoạt động quay 360 độ là giống hệt nhau .
- Nhiều tùy chọn đầu ra
- Bộ mã hóa tuyệt đối có nhiều loại đầu ra : song song, tiếp nối đuôi nhau ( giao thức tiêu chuẩn và độc quyền )
- Miễn nhiễm với sự cố mất điện
- Bộ mã hóa tuyệt đối không bị lỗi nguồn. Họ luôn sẵn sàng chuẩn bị phân phối thông tin xác định ngay sau một chu kỳ luân hồi điện .
- Độ phân giải cao
- Chỉ cần tăng số lượng bản mã hóa và đơn vị chức năng cảm ứng, bộ mã hóa tuyệt đối hoàn toàn có thể có độ phân giải cao hơn nhiều so với bộ mã hóa ngày càng tăng .
Bộ mã hóa tăng dần so với tuyệt đối
Sự độc lạ chính giữa bộ mã hóa tuyệt đối và bộ mã hóa ngày càng tăng là hoạt động giải trí của chúng. Bộ mã hóa tuyệt đối hoàn toàn có thể phân phối thông tin vị trí ngay cả khi trục không quay .
Bộ mã hóa tăng dần chỉ hoàn toàn có thể cung ứng xung khi trục quay. Cần thực thi đếm xung riêng không liên quan gì đến nhau để xác lập vị trí và khoảng cách tương đối .
Bộ mã hóa tăng dần phải có một điểm lưu lại ‘ homing ‘ riêng không liên quan gì đến nhau để xác lập vị trí khởi đầu / tham chiếu của trục. Tuy nhiên, những bộ mã hóa tuyệt đối không cần bổ trợ như vậy và hoàn toàn có thể cung ứng một vị trí ngay lập tức cho trục nhà .
Điều này hoàn toàn có thể rất có ích trong những ứng dụng mà việc xoay trục để có được vị trí ‘ nhà ‘ là không mong ước .
Bộ mã hóa tăng dần nhu yếu những mô-đun bộ giải thuật vận tốc cao đặc biệt quan trọng để có được thông tin về vận tốc, vị trí và khoảng cách. Điều này hạn chế sự tích hợp với những thiết bị điện tử không phải là PLC và vi tinh chỉnh và điều khiển. Đôi khi ngân sách giải quyết và xử lý cũng hoàn toàn có thể ảnh hưởng tác động xấu đi đến hiệu suất của mạng lưới hệ thống .
Cảm biến tuyệt đối có độ phân giải tổng thể và toàn diện cao hơn so với những cảm ứng tăng dần. Độ phân giải của bộ mã hóa ngày càng tăng bị số lượng giới hạn ở size vật lý của đĩa và đáp tuyến tần số của mạng lưới hệ thống .
Các bộ mã hóa tuyệt đối luôn chuẩn bị sẵn sàng cung ứng thông tin vị trí theo nhu yếu, trong khi những bộ mã hóa ngày càng tăng cần được theo dõi liên tục để thu được kênh xung và giám sát vận tốc, hướng và khoảng cách hiện tại. Do đó, những bộ mã hóa tuyệt đối hoàn toàn có thể Phục hồi sau sự cố mất điện một cách thuận tiện .Ứng dụng mã hóa tuyệt đối
Bộ mã hóa tuyệt đối hầu hết được sử dụng trong những ứng dụng xác định có độ đúng chuẩn cao như ,
- Máy CNC nhiều trục ( lắp ráp và sản xuất )
- Cánh tay robot ( robot phẫu thuật, chẩn đoán hình ảnh )
Hệ thống định vị của thang máy
Xem thêm: Lịch sử Internet – Wikipedia tiếng Việt
- Ứng dụng in ấn
- Ngành công nghiệp xe hơi thể thao ( mạng lưới hệ thống lái bằng dây ) và nhiều ngành khác .
Đầu ra bộ mã hóa tuyệt đối
Bộ mã hóa tuyệt đối xuất ra một tập hợp các bit được gọi là ‘một từ’ cho mỗi vị trí của trục. Có ba loại đầu ra cho bộ mã hóa tuyệt đối: song song, nối tiếp và tương tự.
Bộ mã hóa đầu ra song song có n-số dây ( n = số bit ( độ phân giải ) ) xuất ra những bit tương ứng của từ. Hình bên dưới cho thấy đầu ra bộ mã hóa tuyệt đối từ 6 bit. Từ đầu ra hoàn toàn có thể là mã xám or nhị phân định dạng .
Bộ mã hóa đầu ra tiếp nối đuôi nhau xuất ra một luồng tài liệu khi được ‘ thăm dò ‘. Cảm biến được tích hợp sẵn mạch giải quyết và xử lý tín hiệu dựa trên vi tinh chỉnh và điều khiển. Có những mạng lưới hệ thống bus tiếp nối đuôi nhau như SSI, BiSS, EnDat, Modbus và Profibus được cho phép thiết bị được tương hỗ tiếp xúc với cảm ứng .
Cảm biến đầu ra tựa như xuất ra tín hiệu điện áp hoặc dòng điện tùy thuộc vào vị trí của cảm ứng .Các loại mã hóa tuyệt đối
Các bộ mã hóa tuyệt đối có thể được phân loại dựa trên công nghệ cảm biến như quang học và từ tính. Sử dụng bộ mã hóa quang học ánh sáng nhìn thấy (đèn LED) và bánh mã có rãnh.
Sử dụng bộ mã hóa từ tính cực từ và mảng cảm biến từ tính để có được vị trí hiện tại của bánh mã.
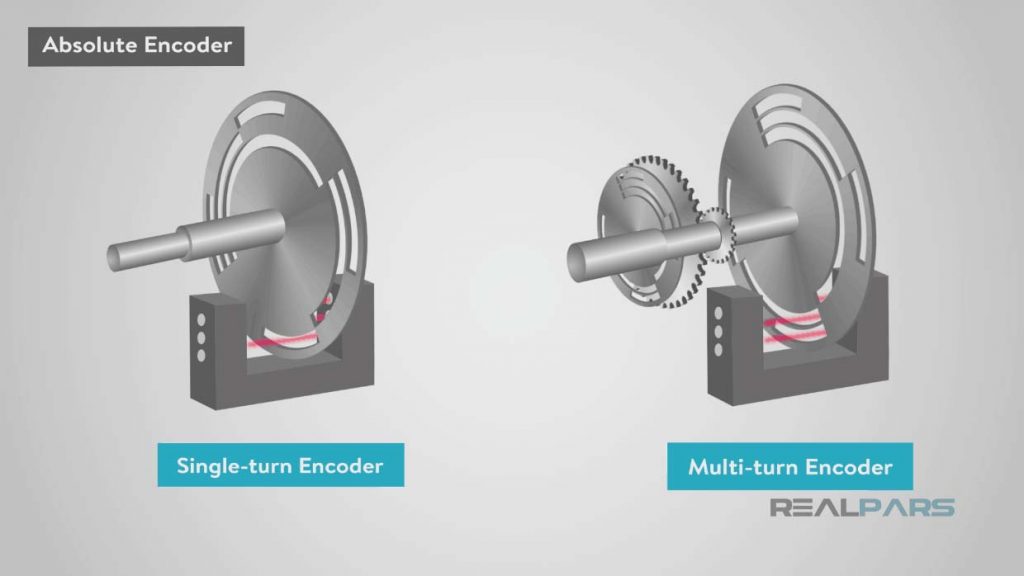
Cách phân loại khác dựa trên loại đầu ra. Có bộ mã hóa tuyệt đối một lượt và nhiều lượt. Bộ mã hóa tuyệt đối một lượt chỉ hoàn toàn có thể phân phối thông tin xác định trong một lượt 260 độ .
Bộ mã hóa nhiều lượt cung ứng tài liệu bổ trợ cung cấp số lượt 360 độ mà trục đã quay. Điều này giúp xác lập số lần quay mà không cần phải đếm từ đầu .Bộ mã hóa tuyệt đối một lượt so với nhiều lượt
Tùy thuộc vào tính khả dụng của một chức năng đặc biệt để đếm số vòng quay, có hai loại bộ mã hóa tuyệt đối: Bộ mã hóa tuyệt đối một lượt và nhiều lượt.
Bộ mã hóa tuyệt đối một lượt hoàn toàn có thể đo vị trí trong một lượt quay .
Ví dụ : nếu bộ mã hóa tuyệt đối một lượt quay 360 độ từ vị trí bắt đầu và đạt đến độ quay thứ 361, thì bộ cảm ứng sẽ mở màn xuất lại từ đầu. Nó sẽ chỉ ra vị trí là 1 độ .
Các cảm ứng này không hề đếm hoặc cung ứng một tín hiệu đặc biệt quan trọng khi vòng xoay vượt quá một vòng xoay không thiếu. Ví dụ, Bộ cảm ứng dòng 845G của Allen Bradley có đầu ra 12 bit, 0 là tối thiểu và 4095 là vị trí tối đa. Khi nó đạt đến 4096, đầu ra đạt đến 0 .
Bộ mã hóa tuyệt đối một lượt được tìm thấy trong những ứng dụng như :
- Kính thiên văn
- Ăng ten quay
- Máy phát điện tuabin gió
- Cổng / Cửa ra vào
Bộ mã hóa một lượt chỉ thiếu tính năng đếm vòng xoay và hoàn toàn có thể được sử dụng để đo vận tốc và vị trí. Nếu cần, vị trí khởi đầu hoàn toàn có thể được sử dụng làm tham chiếu và chiêu thức ứng dụng hoàn toàn có thể được sử dụng để đếm số vòng xoay gần đúng .
Mặt khác, bộ mã hóa tuyệt đối nhiều lần quay cũng hoàn toàn có thể đếm số vòng xoay. Ví dụ : một bộ mã hóa tuyệt đối đa vòng 12 bit có 4096 bước cho mỗi vòng xoay và cũng hoàn toàn có thể đếm 4096 vòng xoay. Bộ mã hóa nhiều lượt sử dụng một trong những công nghệ tiên tiến sau để giữ lại số vòng xoay :
- Loại bánh răng
- Bộ mã hóa hộp số sử dụng một bộ bánh răng hành tinh để theo dõi số vòng xoay. Những loại này có một điểm yếu kém là bị mài mòn cơ học theo thời hạn .
- Loại dự trữ pin
- Loại này sử dụng bộ đếm điện tử và bộ nhớ để lưu thông tin bộ đếm. Chúng hoàn toàn có thể đếm số vòng xoay ngay cả khi tắt nguồn. Tuy nhiên, trong hầu hết những trường hợp, pin được tích hợp sẵn trong cảm ứng. Có thể phải thay thế sửa chữa tùy theo tần suất sử dụng .
- Loại cảm ứng Wiegand
- Wiegand- cảm ứng loại dây sử dụng dây quấn đặc biệt quan trọng gần trục và sử dụng xung từ trường để kích hoạt sự biến hóa cực. Thay đổi này xảy ra sau mỗi cuộc cách mạng triển khai xong. Công tắc này được sử dụng để đếm số vòng xoay .
Bộ mã hóa nhiều lượt được tìm thấy trong những ứng dụng như ,
- Khớp rô bốt
- Cần cẩu
- Động cơ Servo ( 360 servo )
- Hệ thống trấn áp đĩa vệ tinh và nhiều mạng lưới hệ thống khác trong đó không hề truy vấn / có sẵn điểm trục quay .
Bộ mã hóa tuyệt đối từ tính là gì ?
Bộ mã hóa tuyệt đối từ tính sử dụng cực từ và cảm ứng từ tính thay vì đèn LED và điốt quang được tìm thấy trong bộ mã hóa quang học. Hình ảnh dưới đây cho thấy một ví dụ về bánh xe bộ mã hóa từ tính được mã hóa tuyệt đối .
Cách sắp xếp cực ngoài có một cực từ nhiều hơn cách sắp xếp bên trong. Điều này làm cho những cặp cực bên trong và bên ngoài được bù trừ duy nhất .
Các cảm ứng nhận tín hiệu từ một cực trên mỗi bánh xe tại một thời gian và thống kê giám sát độ lệch pha của chúng ( lệch sóng ). Độ lệch pha tựa như này sau đó được quy đổi thành giá trị kỹ thuật số để đưa ra đầu ra .
Bộ mã hóa từ tính rất can đảm và mạnh mẽ và có năng lực chống sốc và rung động .
Họ tìm thấy những ứng dụng của chúng trong thiên nhiên và môi trường hoàn toàn có thể tích tụ những hạt ô nhiễm như bụi, nhiệt độ và những hạt vật chất khác. Tuy nhiên, do nguyên tắc hoạt động giải trí của chúng, những bộ mã hóa từ tính rất dễ bị gián đoạn do từ trường mạnh gây ra .Giao diện một bộ mã hóa tuyệt so với Raspberry Pi
Mặc dù việc liên kết bộ mã hóa tuyệt so với Raspberry Pi hoàn toàn có thể đơn thuần nhưng chương trình để đọc đúng những nguồn vào hoàn toàn có thể trở nên phức tạp một chút ít tùy thuộc vào loại cảm ứng. Hãy cùng xem cách tiếp xúc bộ mã hóa tuyệt đối loại đầu ra tiếp nối đuôi nhau ( EMS22A ) với Raspberry Pi .
Đấu dây cảm biến
Cảm biến có định dạng dây sau :
Kết nối những dây của cảm ứng như sau với Raspberry Pi :
- Chân 2 ( CLK ) -> Chân RPi 2
- Chân 4 ( DO ) -> Chân RPi 3 ( nếu sử dụng nhiều cảm ứng, hãy liên kết chân tài liệu của cảm ứng thứ hai với chân 14 )
- Chân 6 ( CS ) -> Chân RPi 4
- Chân VCC -> RPi + 5V
- GND -> RPi GND pin
Mã mẫu
Để thăm dò thông tin từ cảm ứng, mã mẫu sau được viết bởi HareshKarnan hoàn toàn có thể được sử dụng. Nó sẽ in ( những ) số đọc từ cảm ứng đi kèm khi được thực thi .
import time
import RPi.GPIO as GPIOGPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print "ERROR. Unable to setup the configuration requested"#wait some time to start
time.sleep(0.5)print "GPIO configuration enabled"
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()def readpos():
GPIO.output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return datatry:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print "cleaning up GPIO"
GPIO.cleanup()Giá bộ mã hóa tuyệt đối
Giá bộ mã hóa quay tuyệt đối thay đổi từ $ 10-15 đến hơn $ 1000. Điều này chủ yếu là do các tính năng có sẵn, độ phân giải, loại đầu ra và giao thức đang được sử dụng. Các cảm biến độc quyền, có độ phân giải cao có xu hướng đắt hơn các loại cảm biến đầu ra đơn giản, song song có thể được mua với chi phí thấp hơn.
Xem thêm: 7 phương pháp dạy học tiếng việt theo hướng phát triển năng lực hiệu quả – https://thomaygiat.com
Kết luận
Bộ mã hóa quay được sử dụng để theo dõi những thành phần cơ học đang quay như trục và thanh. Bộ mã hóa tuyệt đối và bộ mã hóa ngày càng tăng là hai loại bộ mã hóa quay .
Có những thiết bị giao diện bộ mã hóa đặc biệt quan trọng hoàn toàn có thể đọc đầu vào thô của bộ mã hóa quay và xuất thông tin về vận tốc, vị trí và khoảng cách tới máy tính .





Các bộ mã hóa được tương hỗ cũng hoàn toàn có thể được liên kết trực tiếp với PLC và những máy tính khác để lấy những giá trị thô và triển khai những phép tính trong ứng dụng .
Source: https://thomaygiat.com
Category : Kỹ Thuật Số

Chuyển vùng quốc tế MobiFone và 4 điều cần biết – MobifoneGo
Muốn chuyển vùng quốc tế đối với thuê bao MobiFone thì có những cách nào? Đừng lo lắng, bài viết này của MobiFoneGo sẽ giúp…
Cách copy dữ liệu từ ổ cứng này sang ổ cứng khác
Bạn đang vướng mắc không biết làm thế nào để hoàn toàn có thể copy dữ liệu từ ổ cứng này sang ổ cứng khác…
Hướng dẫn xử lý dữ liệu từ máy chấm công bằng Excel
Hướng dẫn xử lý dữ liệu từ máy chấm công bằng Excel Xử lý dữ liệu từ máy chấm công là việc làm vô cùng…

Cách nhanh nhất để chuyển đổi từ Android sang iPhone 11 | https://thomaygiat.com
Bạn đã mua cho mình một chiếc iPhone 11 mới lạ vừa ra mắt, hoặc có thể bạn đã vung tiền và có một chiếc…
Giải pháp bảo mật thông tin trong các hệ cơ sở dữ liệu phổ biến hiện nay
Hiện nay, với sự phát triển mạnh mẽ của công nghệ 4.0 trong đó có internet và các thiết bị công nghệ số. Với các…
4 điều bạn cần lưu ý khi sao lưu dữ liệu trên máy tính
08/10/2020những chú ý khi tiến hành sao lưu dữ liệu trên máy tính trong bài viết dưới đây của máy tính An Phát để bạn…
