![Thợ Sửa Máy Giặt [ Tìm Thợ Sửa Máy Giặt Ở Đây ]](https://thomaygiat.com/wp-content/uploads/sua-may-giat-lg-tai-nha-1.jpg)
Phương pháp thiết kế mạch điều khiển trong thủy lực khí nén – Trung tâm CAD/CAM
Mục Chính [hide]
1.Khái quát về phương pháp thiết kế mạch điều khiển
Mạch tinh chỉnh và điều khiển được xem như thể một quả tim của của một mạng lưới hệ thống thao tác khí nén và thủy lực. Do đó trách nhiệm phong cách thiết kế hoàn hảo một mạch tinh chỉnh và điều khiển bảo vệ được sự đúng đắn về nguyên tắc hoạt động giải trí, đơn thuần, đáng tin cậy, không thay đổi và linh động là hế sức được chăm sóc. Muốn như vậy, cơ bản ta phải triển khai trình tự những bước sau :
- Biễu diễn sơ đồ chức năng của quá trính điều khiển.
- Viết chương trình điều khiển của các bước làm việc trong quá trình.
- Xây dựng mạch điều khiển trên cơ sở của phương trình điều khiển
2. Biểu diễn chức năng của quá trình điều khiển
Tùy thuộc vào tính năng thao tác của mạng lưới hệ thống mà trong một mạng lưới hệ thống điều khiển và tinh chỉnh hoàn toàn có thể có một hay nhiều mạch tinh chỉnh và điều khiển thực thi những trách nhiệm riêng không liên quan gì đến nhau. Mặt khác, hầu hết trong những mạng lưới hệ thống, công nghệ tiên tiến tự động hóa văn minh có sự tích hợp rất nhiều những cơ cấu tổ chức chấp hành khác nhau rất phong phú : Cơ khí, khí nén, thủy lực, Điện … do đó trong quy trình tinh chỉnh và điều khiển, tất yếu là nhiều mạng lưới hệ thống điều khiển và tinh chỉnh được phối hợp với nhau, ví dụ : tinh chỉnh và điều khiển khí nén tích hợp với điện, thủy lực, điều khiển và tinh chỉnh theo chương trình PLC, máy tính … Để đơn thuần quy trình điều khiển và tinh chỉnh cũng như tối ưu và đơn giãn phong cách thiết kế ta phải triển khai trách nhiệm màn biểu diễn tính năng của quy trình điều khiển và tinh chỉnh vừa đủ và hoàn hảo nhất .
2.1. Biểu đồ trạng thái
2.1.1. Kí hiệu
Các kí hiệu trình diễn biểu đồ trạng thái của quy trình điều khiển và tinh chỉnh được diễn đạt hình 7.13 .

2.1.2. Thiết kế biểu đồ trạng thái
Biểu đồ trạng thái màn biểu diễn những trạng thái hoạt động giải trí của những thành phần trong mạng lưới hệ thống, mối liên hệ giữa những thành phần và trình tự chuyển mạch của những thành phần. Do đó nó được xem như thể cơ sở bộc lộ nguyên tắc hoạt động giải trí của một mạng lưới hệ thống .Trục tung của biểu đồ trạng thái là màn biểu diễn trạng thái ( hành trình dài hoạt động, áp suất, góc quay, … ). Trục hoành màn biểu diễn những bước thực thi hoặc là thời hạn hành trình dài. Hành trình thao tác được chia thành nhiều bước. Sự biến hóa trạng thái những bước được màn biểu diễn bằng những đường nét đậm. Sự link những tín hiệu được bộc lộ bằng những nét nhỏ và chiều tác động ảnh hưởng được trình diễn bằng mũi tên .
Ví dụ: thiết kế biểu đồ trạng thái của quy trình điều khiển sau:
Xy lanh công dụng kép 1A dẫn hướng những phôi cục tròn đến một khâu thao tác sau đó. Ở hai phía đầu và cuối hành trình dài có gắn 2 cữ hành trình dài 1S2 và 1S3. Pittông di dời đẩy phôi ( hành trình dài đi ) khi đồng thời 1S2 và nút nhấn 1S1 được ảnh hưởng tác động. Thời gian của hành trình dài đi là t1 = 0.6 s, thời hạn hành trình dài về là t2 = 0.4 s, thời hạn pittông lưu trú tại vị trí 1S3 là t3 = 1 s .

2.2.Sơ đồ chức năng
2.2.1. Kí hiệu
Sơ đồ chức năng bao gồm các lệnh và các bước thực hiện.Các bước thực hiện được kí hiệu theo số thứ tự và các lệnh gồm tên loại, loại lệnh và vị trí ngắt của lệnh (hình 7.5).

2.2.2.Thiết kế sơ đồ chức năng
Hình 7.15 mô tả nguyên lý làm việc của máy khoan như sau:
Hình 7.16 Sơ đồ mạch điều khiển khí nén.

2.3.Lưu đồ tiến trình
2.3.1. Kí hiệu
Lưu đồ tiến trình là giải thuật ( thuật toán ) của một quy trình tinh chỉnh và điều khiển. Thể hiện những trình tự hoạt động giải trí, những tín hiệu ảnh hưởng tác động tác động ảnh hưởng đến mạng lưới hệ thống điều khiển và tinh chỉnh .
Các kí hiệu và thứ tự vi trí được mô tả ở hình 7.9

2.3.2. Thiết kế lưu đồ tiến trình
Nguyên tắc hoạt động của mạch điều khiển ở hình 7.10 được thực hiện như sau:

- Bước thực hiện thứ nhất:
Khi pittông ở vị trí bắt đầu ( 1S2 = 1, 1S3 = 0 ) nút nhấn khởi động 1S1 ảnh hưởng tác động pittông đi ra ( 1A + ) .
- Bước thực hiện thứ hai:
Khi pittông đi đến cuối hành trình dài chạm công tắc nguồn 1S2, pittông sẽ lùi về ( 1A – ) .
- Bước thực hiện thứ ba:
Tại vị trí bắt đầu pittông chạm công tắc nguồn 1S2, quy trình điều khiển và tinh chỉnh kết thúc .
- Quá trình điều khiển được viết như sau:
- Bước thực hiện thứ nhất: 1S1∧1S2∧1S3= 1A+ → 1S3.
- Bước thực hiện thứ hai: 1S3=1A- → 1S2.
- Bước thực hiện thứ ba :1S2 = kết thúc quá trình.

Xem thêm: Sửa Tivi Sony Quận Tây Hồ
2.4. Viết phương trình điều khiển của hoạt động hệ thống
Dựa vào biểu đồ trạng thái hoạt động giải trí theo thời hạn của quy trình thao tác mạng lưới hệ thống, dựa vào kim chỉ nan đại số Boole và những thành phần có công dụng nhớ trạng thái ta hoàn toàn có thể viết ra được những phương trình những bước điều khiển và tinh chỉnh của quy trình .Ta hoàn toàn có thể tối ưu những phương trình tinh chỉnh và điều khiển đó tới mức chứa ít tham số biến vào ra càng ít để đơn thuần mạch điều điều khiển và tinh chỉnh và giảm tốn kém về sử dụng những thành phần không thiết yếu .
Ví dụ:
Quy trình điều khiển piston để nén chặt các bã đậu thành các khối bánh được mô tả ở hình 7.20. Tại các vị trí trình tương ứng x0, x1 và x2. Nút nhấn thức hiện hành trình ép là Sp. Đầu tiên piston chạy với tốc độ v1 trong đoạn hành trình không ép S0S1, và sẽ chạy chậm với v2 trong hành trình ép S1S2. Gặp S2 piston sẽ giật lùi về với vận tốc lớn nhất v3 và kết thúc chu kỳ ép tại S0.(chú ý: v3> v1 > v2).Với nguyên lý hoạt động của quy trình ép ta xây dựng được sơ đồ mạch động lực như sau:


Phương trình viết như sau :


![]()
Bước 2-3
- Khi piston gặp S2 thì kết thúc bước 1-2 và thực hiện bước giật lùi 2-3 (A-) và kết thúc tại S0. Khi thực hiện bước 2-3 thì S2 thôi tác động nhưng A- vẫn hoạt động, tức phải có nhớ trạng thái của nó.
- Phương trình được viết như sau:

2.5.Vẽ sơ đồ mạch điều khiển
Mạch điều khiển và tinh chỉnh là tổng hợp những tầng. Tầng là tổng hợp của những thành phần logic điện theo những phương trình tinh chỉnh và điều khiển đã viết được ở trên. Mỗi phương trình tinh chỉnh và điều khiển hoàn toàn có thể xem như thể một tầng. Trong đó Kn là hàm của những tầng và được gán cho những đầu ra hiệu suất của những van điều khiển và tinh chỉnh .

2.6. Ví dụ
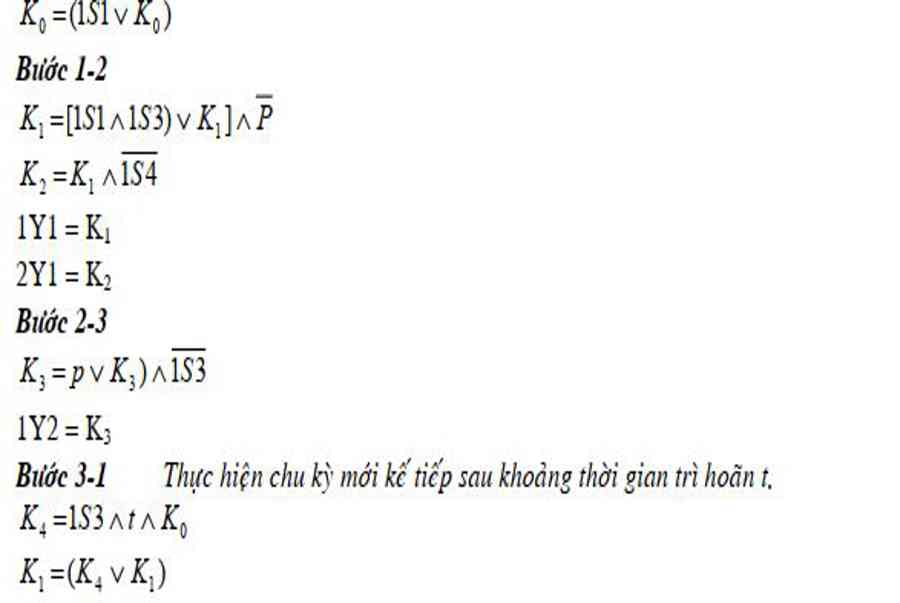
Một thanh hàn nhiệt điện được ép vào một trống tròn xoay được làm mát bằng xy lanh khí nén tác động kép (1A) và hàn tấm plastic thành các ống, hình 7.21. Hành trình duỗi ra được kích bằng một nút nhấn 1S1. Hành trình duỗi với áp suất là 4 bar và khi 1S4 được tác động thì bắt đầu ép cho tới áp suất ép tăng đến 8 bar thì piston giật về. Gặp 1S3 thì piston dừng lại, sau 2 giây thì chu kỳ ép mới lại bắt đều. Trong mạch sử dụng van 5/2/2 coil. Xây dựng mạch điều khiển của cơ cấu hàn nhiệt điện.

Giải :• Biểu đồ trạng thái được diễn đạt hình 7.22Viết phương trình tinh chỉnh và điều khiển vì hoạt động giải trí của mạng lưới hệ thống được triển khai liên tục, do vậy trạng thái nhấn của 1S1 tại ( 1 ) được duy trì trong suốt quy trình .

Xem thêm: Sửa Tivi Sony Huyện Từ Liêm
Ta hoàn toàn có thể sử dụng luật phối hợp để tôi ưu những tầng ở bước 1-2 và 3-1. Xây dựng mạch điện điều khiển và tinh chỉnh. Căn cứ vào số phương trình ở trên ta có số tầng tương ứng. Mạch được biểu lộ dưới đây :

Source: https://thomaygiat.com
Category : Điện Tử

Sửa Tivi Sony
Sửa Tivi Sony Dịch Vụ Uy Tín Tại Nhà Hà Nội 0941 559 995 Hà Nội có tới 30% tin dùng tivi sony thì việc…

Sửa Tivi Oled
Sửa Tivi Oled- Địa Chỉ Uy Tín Nhất Tại Hà Nội: 0941 559 995 Điện tử Bách Khoa cung cấp dịch vụ Sửa Tivi Oled với…

Sửa Tivi Samsung
Sửa Tivi Samsung- Khắc Phục Mọi Sự cố Tại Nhà 0941 559 995 Dịch vụ Sửa Tivi Samsung của điện tử Bách Khoa chuyên sửa…

Sửa Tivi Asanzo
Sửa Tivi Asanzo Hỗ Trợ Sử Lý Các Sự Cố Tại Nhà 0941 559 995 Dịch vụ Sửa Tivi Asanzo của điện tử Bách Khoa…

Sửa Tivi Skyworth
Sửa Tivi Skyworth Địa Chỉ Sửa Điện Tử Tại Nhà Uy Tín 0941 559 995 Điện tử Bách Khoa chuyên cung cấp các dịch vụ…

Sửa Tivi Toshiba
Sửa Tivi Toshiba Tại Nhà Hà Nội Hotline: 0948 559 995 Giữa muôn vàn trung tâm, các cơ sở cung cấp dịch vụ Sửa Tivi…

