![Thợ Sửa Máy Giặt [ Tìm Thợ Sửa Máy Giặt Ở Đây ]](https://thomaygiat.com/wp-content/uploads/sua-may-giat-lg-tai-nha-1.jpg)
sơ đồ mạch điện bộ điều tốc | Dương Lê
Điều khiển tốc độ motor DC là vấn đề được nhiều người quan tâm hiện nay khi mà máy móc đã dần thay thế trong tất cả các khâu của quá trình sản xuất để đem lại năng suất cao hơn. Vậy, việc điều khiển tốc độ motor DC bằng Arduino dễ hay khó? Cùng tìm hiểu nhé!
1. Điều khiển tốc độ motor DC: khái niệm, phân loại?
Trong quá trình điều khiển tốc độ motor DC bằng Arduino, vấn đề mà chúng ta quan tâm chính là motor DC. Vậy, motor DC là gì?
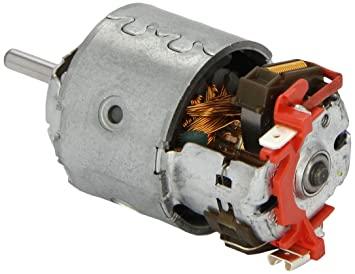
Động cơ một chiều motor DC ( DC là viết tắt của từ tiếng Anh “ Direct Current Motors ” ) là động cơ tinh chỉnh và điều khiển bằng dòng điện có hướng xác lập. Hay nói cho dễ hiểu hơn thì motor DC là loại động cơ chạy bằng nguồn điện áp 1 chiều DC khác với nguồn điện áp AC là điện xoay chiều .
Đầu dây ra của động cơ DC thường bao gồm 2 dây (dây nguồn ký hiệu VCC và dây tiếp đất ký hiệu GND). Nói chung, DC motor là 1 động cơ điện một chiều với cơ năng chuyển động quay liên tục.
Bạn đang đọc: sơ đồ mạch điện bộ điều tốc | Dương Lê
DC là 1 động cơ điện một chiều với cơ năng hoạt động quay liên tục
Động cơ điện 1 chiều DC được phân loại theo kích từ để thành những loại sau :
- Kích từ độc lập.
- Kích từ nối tiếp.
- Kích từ hỗn hợp.
- Kích từ song song.
2. Điều khiển động cơ DC bằng Arduino
Trong phần này, tất cả chúng ta sẽ tìm hiểu và khám phá cách điều khiển và tinh chỉnh vận tốc motor DC bằng Arduino. Chúng ta cũng nên xem xét một số ít kỹ thuật cơ bản để hoàn toàn có thể tinh chỉnh và điều khiển được động cơ DC và trải qua 2 ví dụ đó là cách điều khiển và tinh chỉnh động cơ DC bằng trình tinh chỉnh và điều khiển L298N và board mạch điều khiển và tinh chỉnh Arduino .
a) Mạch điều khiển tốc độ motor PWM DC
PWM hay giải pháp biến hóa độ rộng xung là 1 kỹ thuật giúp cho tất cả chúng ta kiểm soát và điều chỉnh giá trị trung bình hiện tại của điện áp chạy đến thiết bị điện tử bằng cách bật tắt nguồn với một vận tốc nhanh. Điện áp trung bình còn nhờ vào vào chu kỳ luân hồi của xung hoặc là lượng thời hạn tín hiệu BẬT trong đối sánh tương quan với lượng thời hạn tín hiệu TẮT trong cùng một khoảng chừng thời hạn được lao lý .
Vì vậy, còn tùy thuộc vào size đơn cử của động cơ, tất cả chúng ta hoàn toàn có thể chỉ cần liên kết đầu ra của Arduino vào chân của điện trở hoặc Mosfet và triển khai tinh chỉnh và điều khiển vận tốc của motor bằng cách tinh chỉnh và điều khiển đầu ra của PWM. Tín hiệu Arduino có hiệu suất thấp được bật tắt chân tại Mosfet, qua đó động cơ hiệu suất cao sẽ được tinh chỉnh và điều khiển .
Lưu ý : Bạn cần liên kết Arduino GND với nguồn cung ứng nguồn năng lượng của động cơ GND .
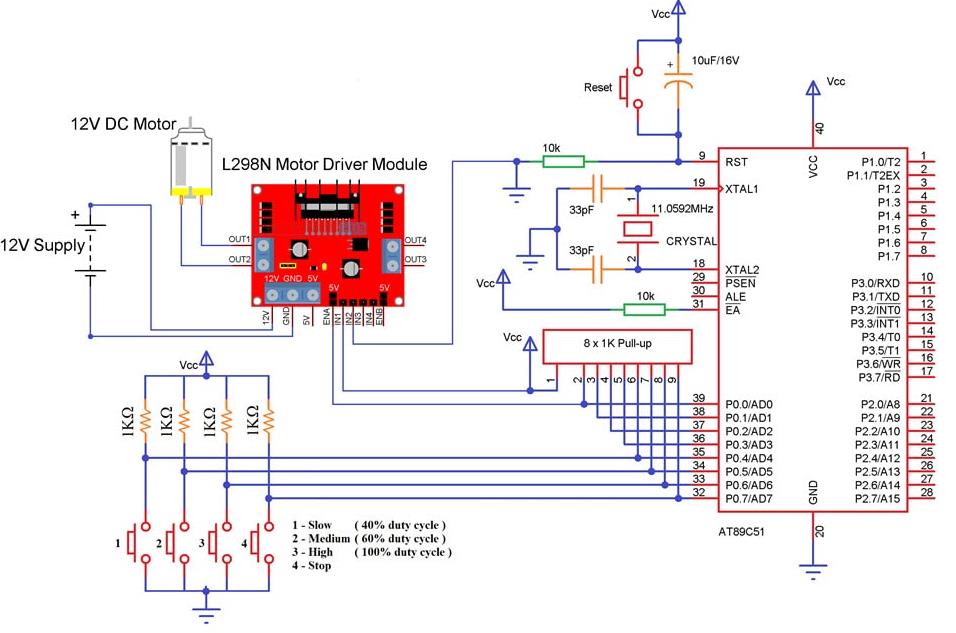
Sơ đồ mạch điện điều khiển và tinh chỉnh động cơ PWM DC
b) Điều khiển động cơ DC bằng mạch cầu H
Để tinh chỉnh và điều khiển hướng quay của motor, tất cả chúng ta chỉ cần hòn đảo ngược lại hướng của dòng điện chạy qua động cơ bằng cách sử dụng mạch cầu H. Một mạch cầu H chứa 4 chân được chuyển mạch, điện trở hoặc Mosfet cùng với động cơ ở TT sẽ tạo thành một thông số kỹ thuật trong giống như hình chữ H. Bằng cách kích hoạt 2 chiếc công tắc nguồn cùng một lúc, tất cả chúng ta đã hoàn toàn có thể đổi khác hướng đi của dòng điện, đồng thời đổi khác được hướng quay của động cơ .
Nếu tất cả chúng ta phối hợp được 2 phương pháp PWM và HBridge thì sẽ hoàn toàn có thể trấn áp trọn vẹn vận tốc động cơ DC. Có nhiều trình điều khiển và tinh chỉnh vận tốc động cơ DC có những tính năng độc lạ này và L298N cũng là một trong số đó .
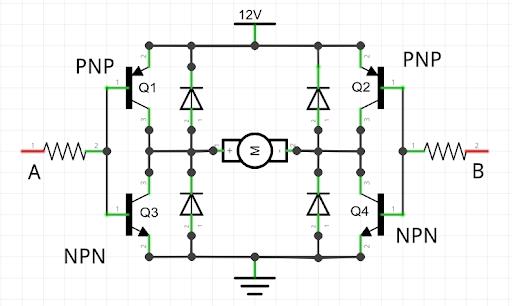
Sơ đồ tinh chỉnh và điều khiển động cơ DC bằng mạch cầu H
c) Bộ điều khiển tốc độ motor DC Chip L298N
L298N là trình để tinh chỉnh và điều khiển động cơ HBridge kép được cho phép tất cả chúng ta tinh chỉnh và điều khiển vận tốc và hướng quay của 2 động cơ DC cùng 1 lúc. Mô đun hoàn toàn có thể điều khiển và tinh chỉnh được động cơ DC mà vẫn có điện áp trong khoảng chừng từ 5 35V cùng với dòng điện cực lớn hoàn toàn có thể lên đến 2A .
Khi đó, tất cả chúng ta cần xem xét kỹ hơn về sơ đồ phần chân của mô đun L298N để lý giải được phương pháp, nguyên tắc hoạt động giải trí của nó. Mô đun này có 2 nhóm chân dành riêng cho động cơ A và B và 1 chân ở giữa dành cho chân Ground và VCC cho động cơ cùng với chân 5V hoàn toàn có thể được xem là đầu vào hoặc đầu ra .
Điều này còn phụ thuộc vào điện áp đang được sử dụng ngay tại động cơ VCC. Mô đun này có tới 5 bộ điều chỉnh 5V trên board mạch được bật/ tắt bằng cách sử dụng sợi dây nối. Nếu điện áp cung cấp của động cơ lên đến 12V thì chúng ta có thể kích hoạt được bộ điều chỉnh 5V và chân 5V lúc này có thể được sử dụng để làm đầu ra để cấp nguồn cho board mạch Arduino.
Xem thêm: Sửa Tivi Sony Quận Hoàng Mai
Nhưng nếu điện áp của động cơ lớn hơn giá trị 12V, tất cả chúng ta cần phải ngắt liên kết dây vì điện áp cao quá sẽ làm hư hỏng bộ kiểm soát và điều chỉnh 5V ở trên board. Trong trường hợp này, phần chân 5V sẽ được dùng để làm đầu vào vì tất cả chúng ta đang cần liên kết nó vào nguồn điện 5V để cho IC hoàn toàn có thể hoạt động giải trí thông thường .
Chúng ta cần chú ý quan tâm rằng, con IC này sẽ làm giảm điện áp xuống còn khoảng chừng 2V. Vì vậy, nếu bạn sử dụng nguồn điện 12V thì điện áp tại những chân của động cơ sẽ còn vào khoảng chừng 10V. Điều đó có nghĩa là tất cả chúng ta sẽ không hề cung ứng được vận tốc tối đa cho đầu ra của động cơ DC .
Các chân ở nút Bật A và Bật B thường được sử dụng để hoàn toàn có thể bật và trấn áp tốt vận tốc của động cơ. Nếu 1 dây xuất hiện trên của chân này, động cơ sẽ được kích hoạt và triển khai hoạt động giải trí ở vận tốc tối đa. Nhưng nếu tất cả chúng ta vô hiệu dây này đi thì hoàn toàn có thể liên kết thêm 1 đầu vào PWM cùng với chân này và hoàn toàn có thể trấn áp được vận tốc của động cơ. Còn nếu muốn liên kết chân này với Ground thì cần chú ý quan tâm rằng động cơ cũng sẽ bị vô hiệu .
Nếu đầu vào 1 nằm ở mức THẤP và nguồn vào 2 nằm ở mức CAO thì động cơ sẽ vận động và di chuyển ngay về phía trước. Ngược lại, nếu như đầu vào 1 đang nằm ở mức CAO và nguồn vào số 2 đang ở mức THẤP thì động cơ sẽ chuyển dời theo hướng lùi. Trong trường hợp cả 2 nguồn vào đều có giá trị giống nhau, đều THẤP hoặc đều CAO, động cơ lúc này sẽ dừng. Điều tựa như sẽ được vận dụng cho nguồn vào số 3 và 4 và động cơ B .
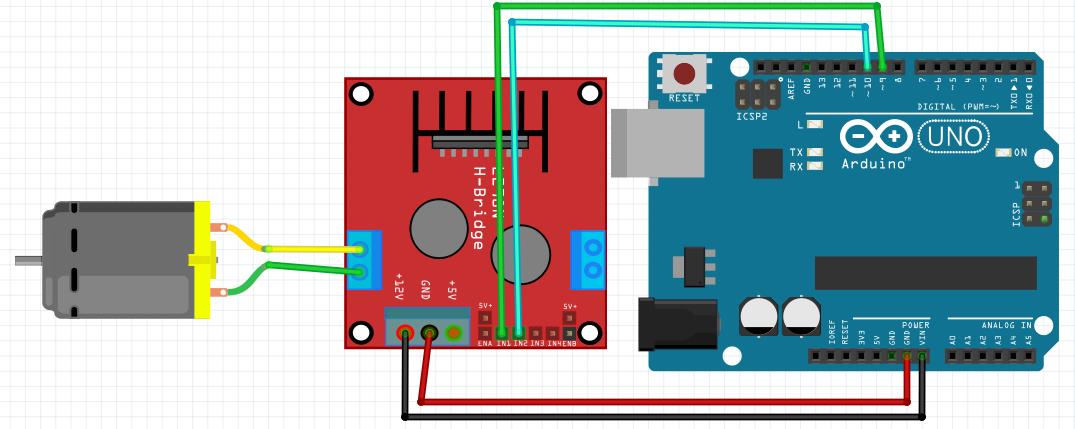
d) Mạch điều khiển tốc độ motor DC Arduino và L298N
Bây giờ hãy triển khai một số ít ứng dụng trong thực tiễn. Ngay trong ví dụ tiên phong, tất cả chúng ta đã tinh chỉnh và điều khiển vận tốc của động cơ DC bằng biến trở và triển khai biến hóa hướng quay bằng 1 nút ấn theo sơ đồ mạch. Vì vậy, tất cả chúng ta cần sử dụng một trình tinh chỉnh và điều khiển L298N, 1 động cơ DC, biến trở, nút ấn và mạch board Arduino .
Các linh phụ kiện thiết yếu như :
- Bộ điều khiển L298N,
- Động cơ DC 12V,
- Board Arduino,
- Breadboard và dây nối.
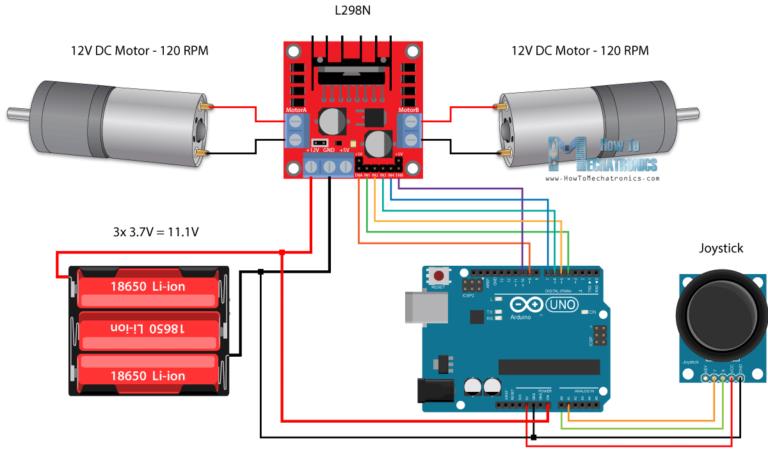
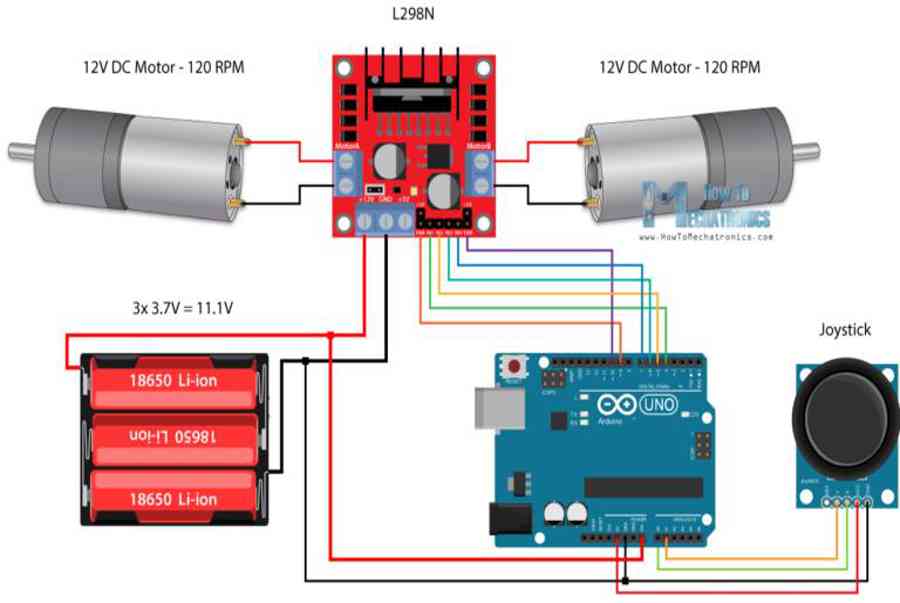
e) Sơ Đồ Điều khiển xe Arduino bằng bộ điều khiển L298N
Tất cả những gì tất cả chúng ta cần sẵn sàng chuẩn bị đó là 2 motor DC, trình điều khiển và tinh chỉnh L298N, board Arduino và ở đầu cuối là cần điều khiển và tinh chỉnh. Về nguồn điện, hãy chọn sử dụng 3 pin Liion 3.7 V để hoàn toàn có thể cung ứng điện áp tổng số là 11V. Làm cho chiếc khung xe bằng ván ép dày thêm 3 mm, sau đó gắn những động cơ vào đó bằng 1 chiếc khung sắt kẽm kim loại. Cuối cùng, gắn bánh xe vào trong động cơ và phía trước bạn gắn 1 bánh xe xoay .
Bây giờ tất cả chúng ta hãy quan sát xem code Arduino sẽ hoạt động giải trí như thế nào nhé .
Sơ đồ điều khiển và tinh chỉnh xe Arduino bằng bộ tinh chỉnh và điều khiển L298N
Sau khi xác lập được những chân, trong phần vòng lặp, những bạn hãy mở màn với việc đọc toàn bộ những giá trị của trục X và Y trong phím điều khiển và tinh chỉnh. Cần tinh chỉnh và điều khiển được làm bằng 2 biến trở lúc này sẽ được liên kết với đầu vào analog của hệ điều khiển và tinh chỉnh Arduino và chúng sẽ có giá trị từ 0 1023. Khi cần điều khiển và tinh chỉnh đạt đến vị trí TT, giá trị của cả 2 loại biến trở hoặc trục sẽ ở vào khoảng chừng 512 .
Tăng thêm một dung sai có giá trị từ 470 550 là chính, nếu thực thi vận động và di chuyển trục Y của phím tinh chỉnh và điều khiển chạy lùi xuống phía dưới số 470, tất cả chúng ta sẽ đặt hướng quay của 2 động cơ chạy về phía sau bằng 4 chân đầu vào. Sau đó, triển khai quy đổi những giá trị cho nó giảm dần từ 470 0 thành quy trình tăng giá trị PWM lên từ 0 255, đây chính là vận tốc của động cơ .
Tương tự, nếu triển khai vận động và di chuyển trục Y của chiếc cần điều khiển và tinh chỉnh về phía trước và giá trị của nó vượt quá 550, lúc này bạn sẽ có những động cơ đang chuyển dời về phía trước và có sự quy đổi số từ 550 1023 để trở thành giá trị PWM từ 0 255. Nếu chiếc cần điều khiển và tinh chỉnh nằm ở giữa thì vận tốc động cơ sẽ được tính bằng 0 .
Tiếp theo, sử dụng trục X cho hệ điều khiển ơ bên trái và ở bên phải của xe. Vì vậy, chúng ta cần chuyển đổi số đọc của trục X thành giá trị tốc độ dao động từ 0 255. Để di chuyển sang phía bên trái, bạn cần sử dụng giá trị này để có thể làm giảm tốc độ động cơ ở phía bên trái và tăng cường tốc độ động cơ ở bên phải. Ở đây, do đặc trưng của các hàm số học, bạn cần sử dụng hai câu lệnh if để tiến hành giới hạn phạm vi tốc độ của động cơ nằm trong khoảng từ 0 255. Tùy thuộc vào lượng điện áp ứng dụng và động cơ chính nằm ở tốc độ thấp hơn, động cơ sẽ không thể di chuyển và khi đó nó sẽ tạo ra âm thanh ù ù. Trong trường hợp này, các động cơ cũng sẽ không thể di chuyển nếu như giá trị của tín hiệu PWM chỉ đạt dưới 70.
Xem thêm: Sửa Tivi Sony Quận Hai Bà trưng
Kết luận
Điều khiển tốc độ motor DC bằng Arduino sẽ không là vấn đề gì nếu bạn tuân thủ các hướng dẫn trong bài viết trên. Khi đó, hãy sử dụng hai câu lệnh if mà chúng tôi đã giới hạn nằm ở phạm vi tốc độ từ 70 255. Cuối cùng, bạn chỉ cần gửi tốc độ động cơ cuối cùng hoặc đơn giản là tín hiệu PWM đến các chân đã được cho phép của trình điều khiển L298N là được.
Nội Dung Có Thể Bạn Quan Tâm:
- Motor Điều Tốc: Ứng Dụng, Các Phương Pháp Điều Khiển Tốc Độ
- Motor DC 12v 24v: Tốc Độ, Tính Năng, Ký Hiệu Mã Hàng
- Cách Làm Máy Phát Điện Từ Motor 3 Pha – Motor DC – Motor Xe Đạp Cũ – Motor Máy Giặt
- Phương pháp tháp lắp hộp giảm tốc, bảo trì, sửa chữa
- Motor giảm tốc đảo chiều quay khi đấu điện
- Ưu nhược điểm motor giảm tốc cũ, giá cả, cách chọn
- Các loại hộp giảm tốc nhiều người dùng nhất Châu Âu, Á
- Các motor giảm tốc rẻ nhất, bền nhất tại Việt Nam
- Cấu tạo hộp giảm tốc, thiết kế và tính lực truyền động bánh răng
Source: https://thomaygiat.com
Category : Điện Tử

Sửa Tivi Sony
Sửa Tivi Sony Dịch Vụ Uy Tín Tại Nhà Hà Nội 0941 559 995 Hà Nội có tới 30% tin dùng tivi sony thì việc…

Sửa Tivi Oled
Sửa Tivi Oled- Địa Chỉ Uy Tín Nhất Tại Hà Nội: 0941 559 995 Điện tử Bách Khoa cung cấp dịch vụ Sửa Tivi Oled với…

Sửa Tivi Samsung
Sửa Tivi Samsung- Khắc Phục Mọi Sự cố Tại Nhà 0941 559 995 Dịch vụ Sửa Tivi Samsung của điện tử Bách Khoa chuyên sửa…

Sửa Tivi Asanzo
Sửa Tivi Asanzo Hỗ Trợ Sử Lý Các Sự Cố Tại Nhà 0941 559 995 Dịch vụ Sửa Tivi Asanzo của điện tử Bách Khoa…

Sửa Tivi Skyworth
Sửa Tivi Skyworth Địa Chỉ Sửa Điện Tử Tại Nhà Uy Tín 0941 559 995 Điện tử Bách Khoa chuyên cung cấp các dịch vụ…

Sửa Tivi Toshiba
Sửa Tivi Toshiba Tại Nhà Hà Nội Hotline: 0948 559 995 Giữa muôn vàn trung tâm, các cơ sở cung cấp dịch vụ Sửa Tivi…

